Unfinished Arch
Rafael Lozano-Hemmer
Antimodular Research
2026
Role: Lead Technical Developer
The Project
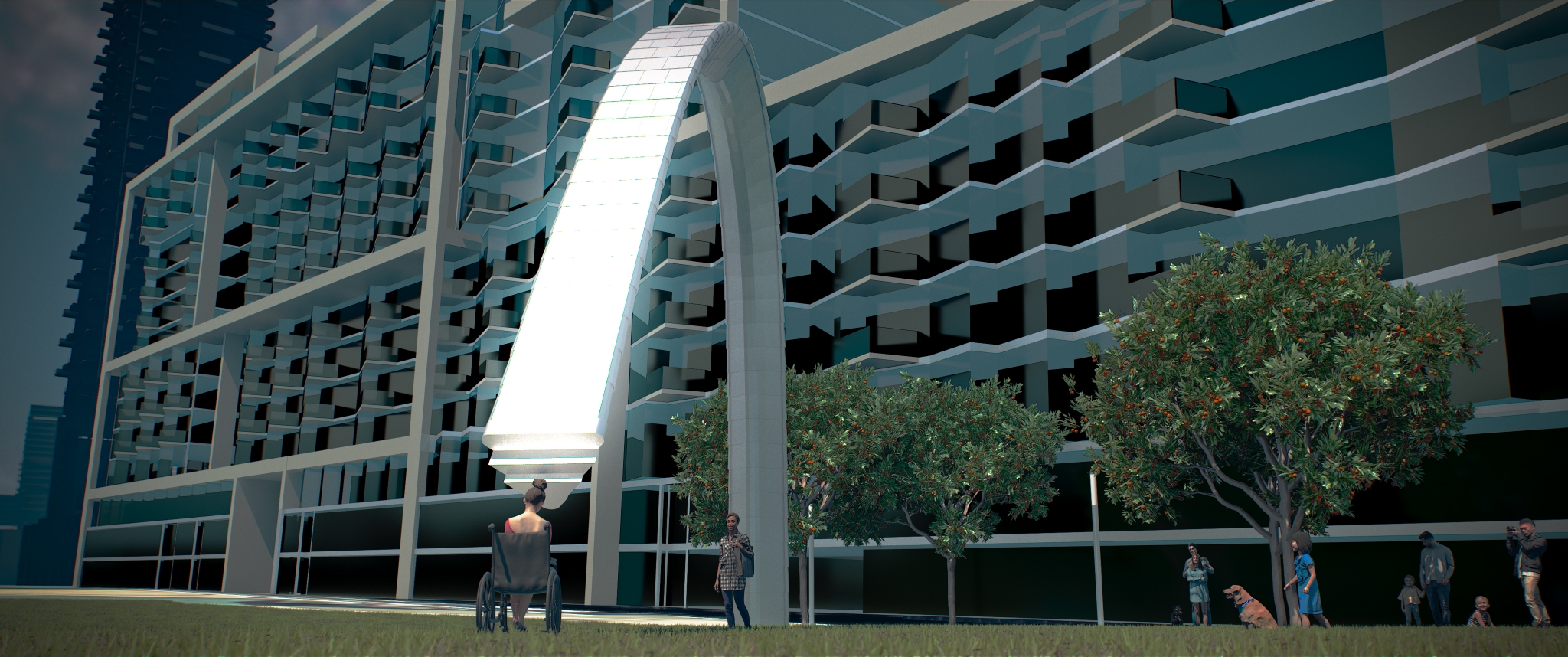
Unfinished Arch is an outdoor, public sculpture installation by Rafael Lozano-Hemmer comissioned by the city of Toronto. The participatory artwork is a 9-meter-tall incomplete arch that will extend over a prominent waterfront park with one end of the arch left suspended in the air. The arch is a marvel of engineering as its heavy body is made out of steel that floats just within the reach of passers-by.
Visitors will be enticed to complete the arch at its floating edge which contains interactive pressure plates. When the arch is completed by a user touching these plates it will illuminate until they remove their hands. A triangular metal plate planted exactly at the location where the missing support for the column would be lends the feeling that visitors are “closing a circuit” between the floor and the arch, illuminating it, as if electricity were passing through their bodies.

As part of the city’s public art initiative, the sculpture will be installed in the Sherbourne Common park in Toronto’s Waterfront district. The sculpture will serve as a large-scale interactive landmark that functions as a gateway to the Sherbourne Common and the waterfront promenade.
As the lead designer of the electronic control system and software that drive the artwork I have been responsible for creating the systems that enable its interactivity. The interaction between viewers and the work is simple; when the load cell sensors inside the metal plates at the end of the arch register the pressure of a user's touch, the arch begins to illuminate. When the pressure is released the illumination recedes. Though the interaction is simple, creating a permanent, weatherproof, interactive sculpture however, involves a set of challenges that the public should never be prompted to consider.

The Process
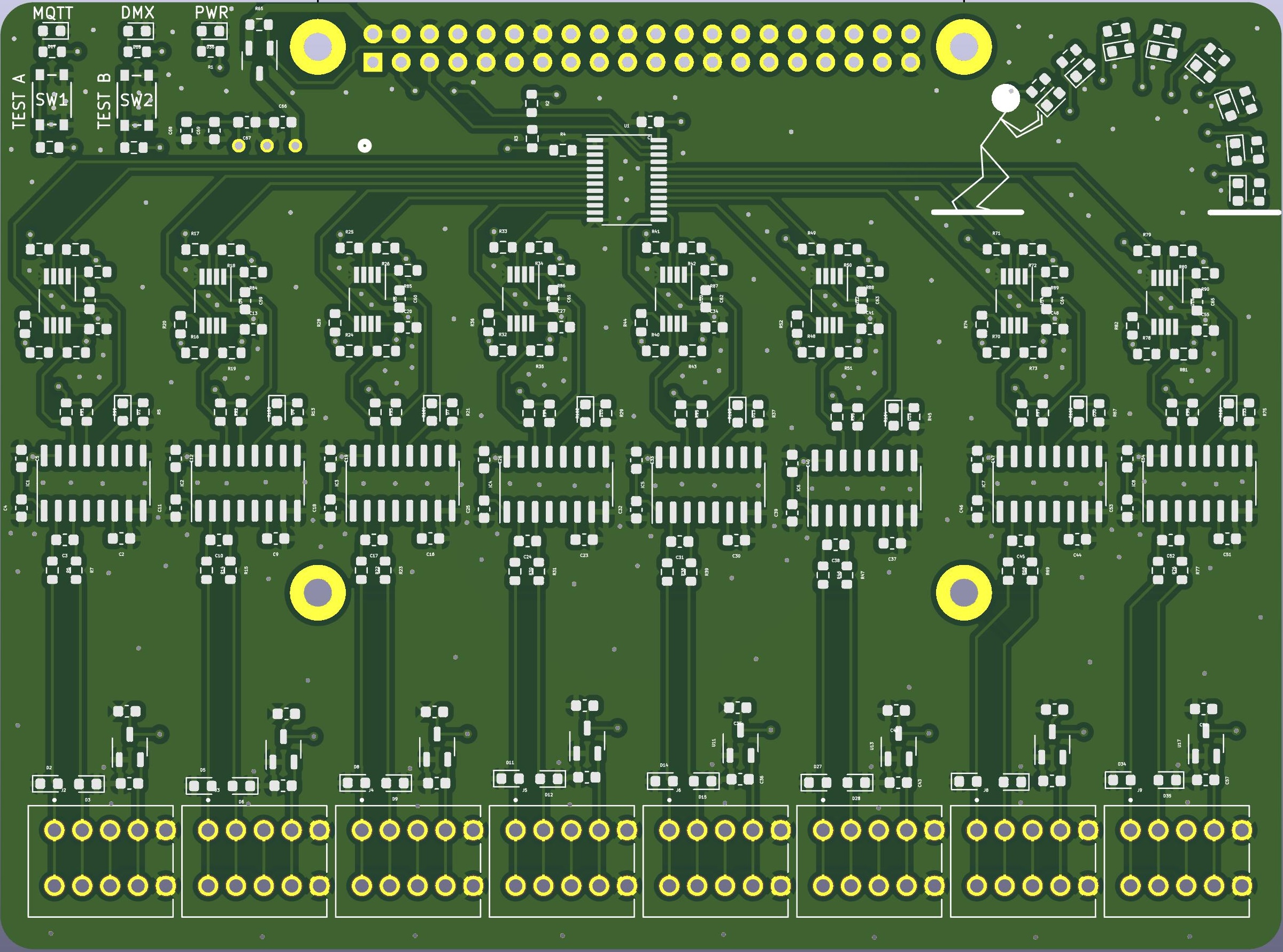
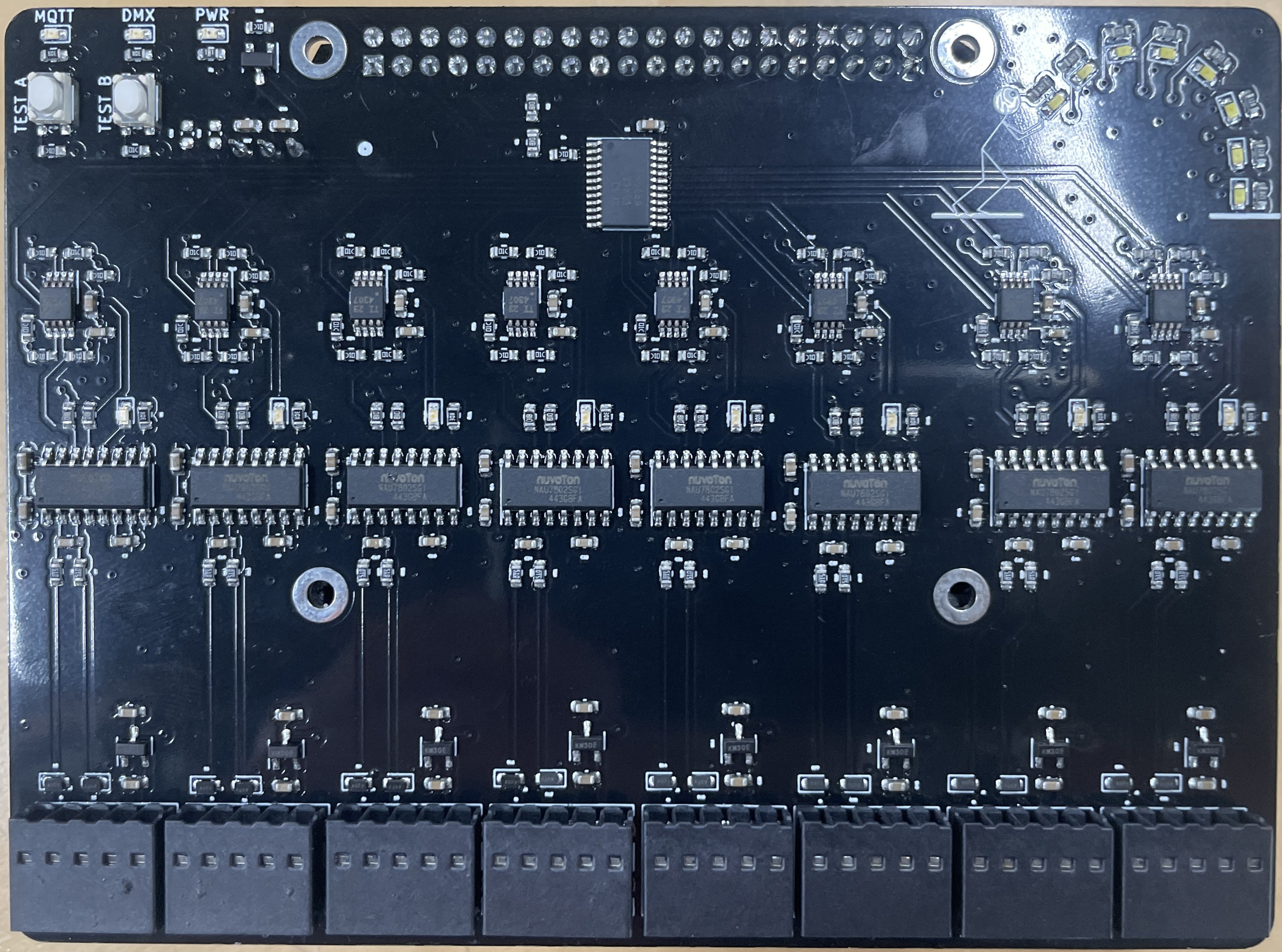
Custom software written in Python and C++ allows for realtime data acquisition from an array of 8 load cells. The load cells are connected to a custom data acquisition board that runs on top of a Raspberry Pi 4. As the pressure readings from the sensor are recorded and processed the lighting animations update to reflect the interaction state.
Software
┌─────────┐───────────────────────────────────────┐
│ESP32 -C6│ │
└─────────┘ │
│ │
│ ┌────────────────┐ ┌────────────────┐ │
│ │C++ (Arduino) │ │HTML │ │
│ ├────────────────┤ └────────────────┘ │
│ │multi-channel │ │relay mangement │ │
│ │relay sequencer◄┼───┼interface │ │
│ └────────────────┘ └────────────────┘ │
└──────────────────────▲──────────────────────────┘
│
│
│
┌──────┬────────────────────────┼────────────────────────────────────┐
│RPi 5 │ │ │
└──────┘ ┌─────┴─────┐ │
│ ┌──────────────►│MQTT broker┼──────────────────┐ │
│ │ └──┬─────▲──┘ │ │
│ │ │ │ data / status │
│ sensor data data status │ │
│ │ │ │ │ │
│ ┌───────┼────────┐ ┌──────▼─────┼───────┐ ┌─────────▼─────────┐ │
│ │python │ │C++ (openFrameworks)│ │python │ │
│ └────────────────┘ └────────────────────┘ └───────────────────┘ │
│ │realtime sensor │ │data processsing, │ │status / data │ │
│ │management and │ │ArtNET / DMX │ │publisher to online│ │
│ │data acquisition│ │management, and │ │portal for remote │ │
│ └────────────────┘ │animation generation│ │management │ │
│ └────────────────────┘ └───────────────────┘ │
└────────────────────────────────────────────────────────────────────┘
To help facilitate testing and rapid prototyping, I created the initial version of the software interface using a C++ platform called openframeworks. This allowed for the testing and development of the custom data acquisition board to progress independently of the animation and lighting effects.
Using an MQTT broker to stream sensor data from the data acquisition board to the animation control application gave me more flexibility in testing the design to ensure both the animation and interaction are just right.
Using an MQTT broker to stream sensor data from the data acquisition board to the animation control application gave me more flexibility in testing the design to ensure both the animation and interaction are just right.
Software Demo
Hardware
Reliability has been a major focus during the design of this work. Designing logical redundancies in the custom electronics, protection mechanism for natural phenomenon like lightning, as well as remote debug and control mechanisms all ensure that the sculpture will continue to function smoothly.